

産業用倉庫におけるピッキング自動化: テクノロジーと選択ガイド
 業界ニュース
業界ニュース
ピッキングは倉庫運営コスト全体の約 55% を占めますが、金属加工や工業生産環境では、この数字がさらに上昇することがよくあります。板金パネルの重量は数百キログラムです。パイプとプロファイルは数メートルに及びます。消費財流通用に構築された標準的なピッキング手法は、これらの資材に対応できません。その結果、取り出しが遅くなり、在庫が損傷し、生産量に比例して人件費構造が増大します。
ピッキングの自動化により、その関係が壊れます。自動化された取り出し、インテリジェントな保管システム、およびソフトウェア主導の在庫管理を統合することにより、最新の施設は取り出し時間を最大 70% 短縮すると同時に、材料のトレーサビリティを向上させ、フロアレベルでの事故を削減しています。このガイドでは、ピッキング自動化が産業環境でどのように機能するか、それを可能にするテクノロジー、金属および製造環境で最も重要な選択基準について説明します。
産業用倉庫におけるピッキング自動化の実際の意味
従来の倉庫保管では、ピッキングとは、特定の品目を見つけて取り出し、保管場所から処理ステーションまたは発送エリアに配送するプロセスを指します。手作業による倉庫では、作業員が保管通路を物理的に移動し、正しい品目を特定し、多くの場合フォークリフトやクレーンを使用して必要な場所まで輸送する必要があります。これらの各ステップでは、時間のコスト、エラーのリスク、および物理的な負担が生じます。
ピッキングの自動化では、このプロセスの手動要素を機械システムとソフトウェア システムで置き換えるか、補完します。最も完全な実装では、倉庫管理システム (WMS) が取り出し要求を受信し、最適な保管スロットを特定し、自動取り出し機構 (スタッカー クレーン、ガントリー ロボット、またはロボット アーム) を派遣し、品目を固定の積み込みステーションまたは積み下ろしステーションに配送します。作業者は、重い荷物を探したり、移動したり、手作業で扱ったりすることなく、資材を受け取ることができます。
メタルストレージ環境の重要な違い ここでのピッキング自動化は、最大 3,000 kg のシートパネル、最大 12 メートルの長さのパイプ、さまざまな断面のバーやプロファイルなど、重く、特大で、多くの場合不規則な材料を対象として動作します。自動化システムは、パレット化された消費財用に設計されたシステムを適応させるのではなく、これらの荷重特性に合わせて特別に設計する必要があります。
自動ピッキングシステムのコア技術
産業環境における最新のピッキング自動化は、いくつかのテクノロジー層を組み合わせています。それぞれに異なる役割があり、それらの統合によってシステム全体のパフォーマンスが決まります。
| テクノロジー | 機能 | 金属保管における一般的な用途 |
|---|---|---|
| 自動保管・検索システム(あS/RS) | スタッカークレーンまたはガントリーロボットを介してアイテムを自動的に保管および取り出します | 板金パネル、垂直タワーシステムのパイプカセット |
| インテリジェントなロード/アンロード マニピュレータ | 保管ラインと処理ラインの間で材料を搬送するロボットアームまたはガントリーシステム | レーザー カッター、プレス ブレーキ、CNC マシンを保管場所から供給 |
| 倉庫管理システム (WMS) | 在庫の追跡、ピッキングのスケジュール、ERP システムとのインターフェースを行うソフトウェア層 | リアルタイムのスロット割り当て、材料トレーサビリティ、注文順序付け |
| PLC およびタッチスクリーン制御 | 保管および取得コマンド用の操作制御インターフェース | 自動重量検出とスロット確認によるオペレーターによる取り出し |
| コンベヤとAGVの統合 | 保管場所とワークステーション間の材料の水平輸送 | パネル供給用のローラーコンベア。部門間の搬送用AGV |
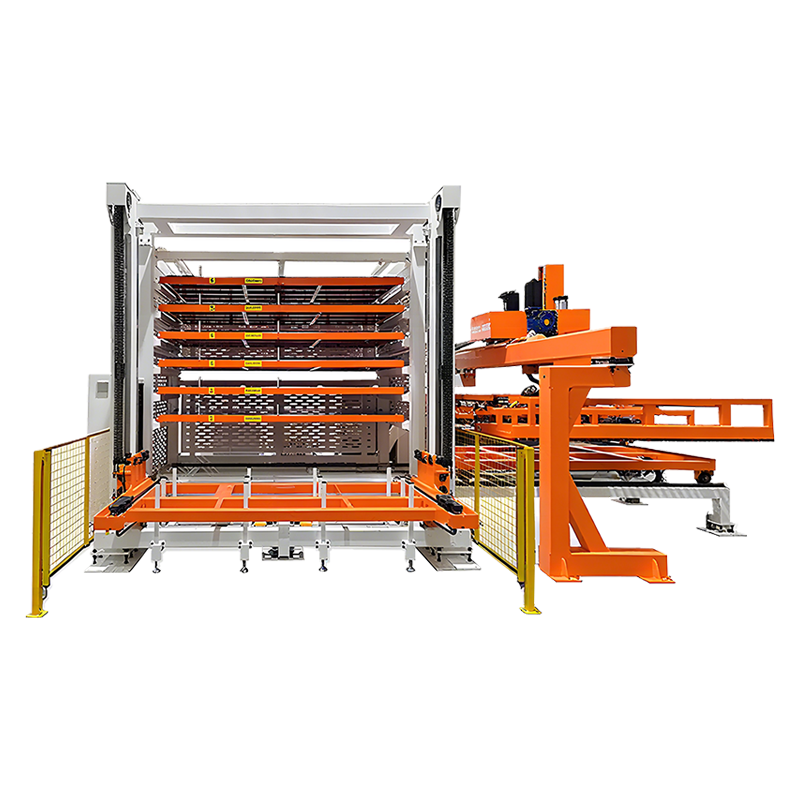
実際には、単一のテクノロジに関する決定で最も影響力があるのは、ストレージ システム アーキテクチャの選択です。これにより、どのような取得メカニズムが可能かが決まるからです。あ 垂直多層構造とPLC制御を備えた自動板金保管システム 隣接する在庫に影響を与えることなく、単一品目を取り出すことができます。この機能は、手動または半自動のラックでは再現できません。
自動ピッキングによって業務パフォーマンスがどのように向上するか
産業用金属保管庫におけるピッキング自動化のパフォーマンスケースは、速度、精度、スペース効率、安全性という 4 つの測定可能な次元に基づいて構築されています。
- 取得速度: 自動検索システムは、手動操作と比較してピッキング サイクル時間を 50 ~ 70% 短縮します。スタッカー クレーンやガントリー ロボットは、特定のシートやパイプ カセットを数秒で見つけて配送できます。この作業には、従来のラック システムではフォークリフト オペレーターが数分間のナビゲーションと位置決めを必要とします。材料の遅延が機械のダウンタイムに直接影響する生産ラインでは、この速度の違いがコストに直接影響します。
- ピック精度: WMS 統合を備えた自動保管システムは、99% 以上のピッキング精度を達成します。各ストレージ スロットはデジタル的に割り当てられ、取得時に確認されるため、SKU 数が多い施設や類似した材質タイプの施設での手動操作でよくある誤認識エラーが排除されます。これは金属加工に特に関係しており、材料グレード間の混同(軟鋼とステンレス、標準と高強度)が下流での品質低下を引き起こす可能性があります。
- スペース使用率: 垂直型自動ストレージ システムは、手動ラック構成では不可能な床面積を回収します。 AS/RS ソリューションは、フロアスタックまたは従来のカンチレバー配置と比較して、同等のストレージ容量に必要な設置面積を最大 85% 削減することが示されています。敷地面積が限られている施設では、この空間効率により、建物を拡張することなく生産能力の拡大が直接可能になります。
- 職場の安全: 労働者を重労働な手作業から排除し、フォークリフトやクレーンの移動が行われる通路から排除することで、事故の発生頻度が大幅に減少します。 インテリジェントなロードおよびアンロード マニピュレータ 高精度センサーを装備しており、危険区域内で人が介入することなく、保管装置と処理装置の間の材料の移動を処理します。
長尺材料のピッキング自動化: パイプ、プロファイル、バー
長い素材には、ピッキング自動化に関する特定の一連の課題が存在します。その長さ (多くの場合 6 ~ 12 メートル) により、標準的な AS/RS タワーの設計は適用できなくなります。重量配分は非対称です。そして、それらを取得するには、通常、ストレージユニットの表面ではなく端からのアクセスが必要です。
長尺材料専用の自動システムは、電動回収機構を備えたカンチレバーまたはカセットベースのアーキテクチャを通じてこれらの制約に対処します。あ 自動検索機能を備えた長尺材料保管ラック スタッカー クレーンまたはサーボ駆動アームを使用して、選択したカセットを固定のアンロード位置に搬送し、パイプ、バー、プロファイルを専用のカセットまたはカンチレバー ベイに保管します。これにより、フォークリフトのオペレーターが、特定の長さのパイプを取り出すために密集したラック通路に移動する必要がなくなります。これは、従来のパイプ保管庫における遅延と損傷の共通の原因です。
これらのシステムに WMS を統合すると、カセットごとの材料グレード、熱数、長さ、表面状態を追跡するなど、追加のインテリジェンスが可能になります。長さ調整作業のための自動ピッキング リストを生成します。また、リアルタイムの在庫データを備えた生産スケジューリング システムを提供することで、材料不足による生産の停止を防ぎます。
自動ピッキングと生産ラインの統合
ピッキング自動化の真価は、ストレージ システムがスタンドアロンの検索機能として動作するのではなく、下流の処理装置と直接統合されたときに実現されます。金属加工環境では、これは自動保管システムをレーザー カッター、プラズマ テーブル、プレス ブレーキ、パンチング マシンに接続し、材料供給が一連の手動介入ではなく、システム管理された継続的なプロセスになることを意味します。
A 完全に統合された自動保管および検索システム (AS/RS) ERP または MES システムから製造オーダーを受信し、WMS で必要な材料を特定し、検索メカニズムを派遣し、シートまたはパイプを機械の積載ゾーンに配送します。これらすべてをオペレータが材料の流れに関与することなく実行できます。オペレーターの役割は、物理的な取り扱いから品質検証と例外管理に移ります。
この統合モデルにより、生産セルへのジャストインタイムの材料配送も可能になります。機械側で大量の材料を事前に準備するのではなく(フロアスペースを消費し、取り扱いのリスクが生じます)、自動化システムは、生産スケジュールによって指示された順序とタイミングで材料を配送します。このアプローチを導入した施設では、仕掛品の在庫と機械のアイドル時間が大幅に削減されたと報告しています。
ピッキング自動化投資の評価: 主要な基準
産業用金属保管環境に適切な自動ピッキング システムを選択するには、システム仕様を実際の運用に適合させる必要があります。 4 つの要素が決定を左右します。
- 材質の特徴: ユニットあたりの重量、最大寸法 (シート サイズまたはパイプの長さ)、材料タイプ別の必要な保管容量、および取り出し頻度のすべてが、適切な保管アーキテクチャーと取り出しメカニズムを決定します。長さ 6 メートルのプロファイルでカセットあたり 3,000 kg の定格を持つシステムには、軽薄板金属製造作業に使用されるシステムとは根本的に異なるエンジニアリング要件があります。
- 本番環境の統合要件: システムがレーザー カッターまたは CNC 機械に直接フィードを供給する必要がある場合、アンロード ステーションの位置、コンベア インターフェイス、および取り出しサイクル タイムを機械のフィード ケイデンスに一致するように設計する必要があります。一般的なステージング領域に配信するスタンドアロン ストレージ システムは、運用統合システムとは仕様が異なります。
- WMS と ERP の互換性: システムのソフトウェア プラットフォームが既存の ERP、MES、または生産計画システムと統合されているかどうかを確認します。在庫トレーサビリティとピッキング リストの自動生成の価値は、システム間のリアルタイム データ交換に完全に依存します。既存の統合プロトコルとリファレンス インストールのドキュメントを求めてください。
- スケーラビリティとモジュール性: 運用要件が変わります。ストレージレベルを追加したり、カセット容量を増やしたり、追加の自動化モジュールを統合したりして拡張できるように設計されたシステムは、ビジネスの成長に合わせて初期資本投資を節約します。拡張できない独自のアーキテクチャは長期的な制約を生み出します。
板金、長尺材料、および完全に自動化された保管カテゴリーにわたる利用可能なソリューションの包括的なビューについては、 完全なインテリジェント ストレージ製品群 、どの構成が施設の特定のマテリアル フローと生産要件に適合するかを評価するためのエンジニアリング コンサルティングが利用可能です。現在、世界の倉庫オートメーション市場は約 300 億ドルと評価されており、産業運営がすでにこの移行を進めている規模を反映しています。 ピースピッキングロボットは 2031 年まで 15.27% CAGR で成長すると予測 生産ラインとの統合がセクター全体で深まるにつれて。





当社の製品にご興味がございましたら、お気軽にご相談ください
ニュースセンター
モバイル端末

お問い合わせ
- 住所: 山東省有瑞機械集団有限公司、オフィスビル205号室、山東省臨沂市平儀県平宜街板橋路と黄金路の交差点にある。
- 電話: +86-19819101584
- メールアドレス: [email protected]
臨沂余朝ストレージインテリジェントマニュファクチャリング株式会社 すべての権利を留保します。すべて予約済みです。 倉庫ラックメーカー 倉庫棚工場
